23日,由航天科技集团主办的第三届创新创意大赛开幕,在本届大赛上,记者了解到,一套用于运载火箭助推器和整流罩回收的系统进入研制末期,我国航天器回收技术研发取得新进展。
我国航天器回收技术取得新进展
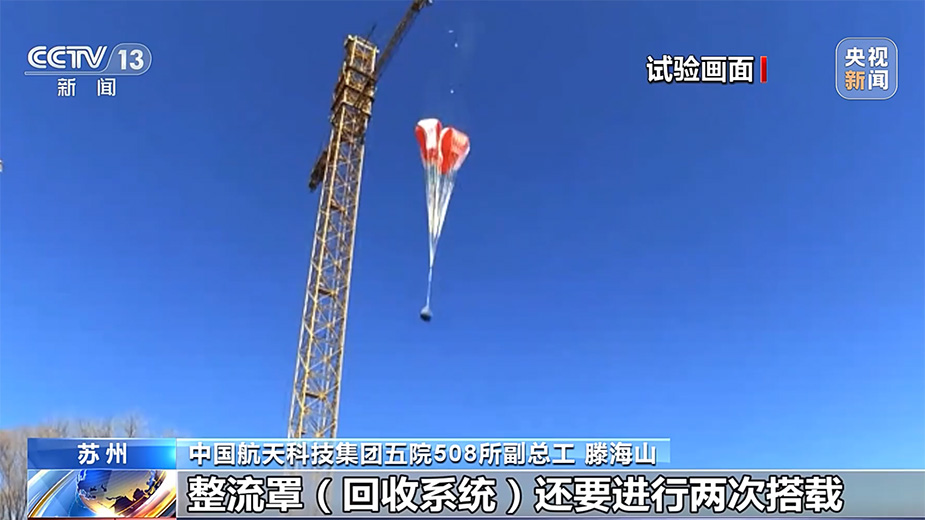
这套系统采用的是大型翼伞回收方式,由降落伞、程序控制和遥测遥控等多个子系统组成,主要对火箭发射中可以重复使用的助推器与整流罩等分离体进行落区控制和回收。
中国航天科技集团五院508所副总工 滕海山:在它下落的过程中,我们开伞,利用它的滑翔控制性能,能够把原来30~90公里的范围,缩小到比较小,降到指定的地方去。着陆区,我们给它弄成着陆床,加上缓冲,就像落在床垫上一样,是完全可以实现无损回收的,所以可以重复使用。
滕海山介绍,我国运载火箭近两年的年发射次数均超过50次,如果用上火箭分离体回收系统,每年可节约十几亿元人民币的发射成本。成本的降低可以让火箭的发射价格更低,带来更好的经济性。目前,该技术已实现火箭助推器落区控制带伞着陆,进入试验验证阶段的尾声。

中国航天科技集团五院508所副总工 滕海山:现在这个技术已经比较成熟,已经具备4吨级助推器的回收能力,长三乙火箭、长三丙火箭还有长二F火箭的助推器,我们都能回收。我们现在实现的是长二丙火箭的整流罩3米35直径的回收,我们还有4米和4米2直径的整流罩,实际上这些都差不多,所有的整流罩我们都能回收。今明两年还要进行两次助推的回收系统搭载,整流罩回收系统还要进行两次搭载,如果都没有问题,这个就完成了设计定型。
除了航天器回收系统,本次创新创意大赛还展示了空间抗辐射防护薄膜、高空高分辨立体成像激光雷达等60项融合了航天技术的新成果。

钻地三尺 地下空间探测机器人亮相
除了能上天的,还有能入地的,在这次大赛中,一款专门深入地下的探测机器人,引起了大家的关注,未来,它甚至可以帮助我们探究月球、火星的地下空间。
总台央视记者 吴天白:在本次大赛中,我们还发现了这样一款智能四足机器人,通常我们所说的机器人都需要人的操控,来完成各种工作。而我眼前的这台机器人则是通过“自主操控”和“智能学习”技术,在完成任务的同时,还可以不断学习,来完善自己的工作方式。
中国空间技术研究院杭州中心人工智能分中心副主任 胡海东:我们四足机器人它头部装有一个激光雷达和相机,就相当于人的眼睛。内部是装有一些感知计算单元,就相当于人的大脑一样,一块是深度学习的人工智能算法,主要用于对相机的图片进行分析,来引导机器狗进行探查。我们也把人工智能的强化学习方式算法应用在里面,让它在不断移动当中能去学习一个更好的步态、行动方式,让它不断进化。

借助智能学习与自主判断的优势,这台机器人可以在幽暗密闭环境下轻松适应陡坡、楼梯等危险地形,并具备全自主的导航规划、灵巧操作能力。机器人平台负载能力不小于30kg,可安装6自由度的机械臂和光学载舱,更好地完成地下隧道巡检维修、探测救援、月球及火星的熔岩洞探测采样等工作。
中国空间技术研究院杭州中心人工智能分中心副主任 胡海东:比如说月球表面有洞穴是17℃的恒温,非常适合于将来航天员登陆月面以后作为一个长期的栖息地。机器狗将来在登陆月球表面之后,就会对这些月球表面洞穴进行一个探查,为将来我们我国航天员长期在月面工作提供一个前期的科考。那么我们预计今年年底会推出民用原型产品,明年上半年会推出民用正式产品。



